- お知らせ
ドローンによる安全な外壁調査を実現するシステムを開発―地上からの赤外線調査と同等の診断性能を確認―
株式会社コンステック
国立研究開発法人新エネルギー・産業技術総合開発機構
一般財団法人日本建築防災協会
一般社団法人日本建築ドローン協会
国立大学法人神戸大学
日本アビオニクス株式会社
NEDOが進める「規制の精緻化に向けたデジタル技術の開発/ドローン等を活用した建築物の外壁の定期調査に係る技術開発」において、日本建築防災協会、日本建築ドローン協会、神戸大学、日本アビオニクス(株)、(株)コンステックはこのたび、ドローン飛行時の風などの影響下でも高い性能を維持する「小型赤外線装置」と、これを搭載して安全な外壁調査を可能にする「近接調査用ドローンシステム」を開発しました。
このドローンシステムは、ドローン飛行時にGNSSの位置情報が安定しない場合にシームレスに自動でVisual SLAMに切り替わる機能を備えたドローンと、物理的な安全飛行を可能とする2点係留装置で構成されます。実際に外壁の浮きやはく離を検出する精度を検証した結果、地上からの外壁調査診断で用いる一般的な赤外線装置(地上設置)と同等の性能を持つことを確認しました。さらに同システムの社会実装を後押しするため、SLAM情報を利用した赤外線画像のポスト処理によって検出精度を向上する技術も開発しました。
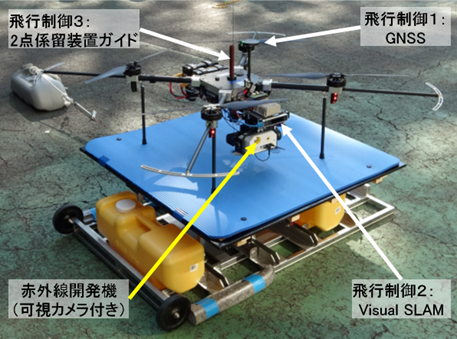
図1 近接調査用ドローンシステム
1.概要
建築基準法第12条第1項の規定に基づき、建築物の所有者は経年劣化などの状況を一級建築士などに調査させて特定行政庁※1に報告することが義務付けられています。また同法施行規則第5条およびこれに基づく平成20年国土交通省告示第282号(2008年)により、外壁については原則10年ごとにテストハンマーによる全面打診などによる調査が求められています。ただ全面打診による調査は仮設足場などを設置する必要があり、建築物所有者の費用負担が大きいという課題がありました。
これに対し、ドローンと赤外線装置を用いた外壁調査は仮設足場などが不要なため、調査期間の短縮やコスト削減効果が見込めます。また赤外線装置法による調査は、技術的な課題を克服できれば早期の社会実装を実現できるという期待が高まっていました。こうした中、国土交通省は2017年度および2018年度の「建築基準整備促進事業(T3)」の一環として赤外線装置を搭載したドローンによる診断方法(調査手順、安全確保技術など)を検討し、検出精度や飛行の安全・安定性といった複合的な影響による運用上の課題を示しました。
これを踏まえ、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)は「規制の精緻化に向けたデジタル技術の開発/ドローン等を活用した建築物の外壁の定期調査に係る技術開発」に取り組んでおり、一般財団法人日本建築防災協会と一般社団法人日本建築ドローン協会、国立大学法人神戸大学、日本アビオニクス株式会社、株式会社コンステックはこのたび、ドローン飛行時における風などの外乱の影響下でも高い性能を維持する「小型赤外線装置」を開発するとともに、これを搭載して安全な外壁調査を実現する「近接調査用ドローンシステム」を開発しました。
このシステムは、ドローン飛行時においてGNSS※2の位置情報が安定しない場合シームレスにVisual SLAM※3へ自動で切り替わる機能を持つドローンと、物理的な安全飛行を可能とする2点係留装置※4で構成されます。実際に外壁の浮きやはく離を検出する精度を検証した結果、地上からの外壁調査診断で用いる一般的な赤外線装置(地上設置)と同等の性能を持つことを確認しました。
さらに同システムの社会実装を後押しするため、SLAM※5情報を利用した赤外線画像のポスト処理※6によってドローンによる診断の検出精度を向上する技術も開発しました。
2.今回の成果
【1】ドローン飛行時の風などの影響による性能低下が起きにくい小型赤外線装置の開発
従来のドローンに搭載されている赤外線装置は、ドローン飛行時のダウンウォッシュ※7など風の影響によって赤外線装置の性能が低下してしまう例が確認されていました。このため本事業ではハードウエアの設計見直しとソフトウエアの追加を行いました。また小型・軽量かつ低消費電力でも動作するように工夫し、ドローンへの搭載を可能にしました。
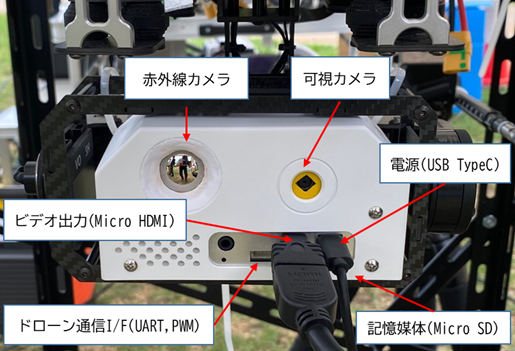
図2 外壁点検調査用として開発した小型赤外線装置
表1 赤外線開発機の仕様
| 寸法 | 125mm x 66mm x 68mm |
| 質量 | 430g |
| 温度分解能 | 50mK 以下 |
| 熱画像の画面均一性 | ±1℃以下 |
| 画像解像度 | 熱画像VGA(640 x 512) 可視画像4K(3840×2160) |
| 映像出力 | 720p(1280 x 720) Micro HDMI |
| ドローンインターフェース | PWM、UART |
| 画像保存 | Micro SD カード |
【2】人口集中地区、GNSS捕捉困難な環境でも安全・安定的に飛行可能な近接調査用ドローンシステムの開発
従来の赤外線装置を搭載したドローンは一般に、建築物に接近した状態や人口集中地区およびGNSSの位置情報が不安定な環境下では安全かつ安定した飛行が難しいとされています。これに対応するため、今回開発した「近接調査用ドローンシステム」ではGNSSによる位置情報以外に、Visual SLAMやOptical Flow※8、LiDAR※9、Range Finder※10などのセンサを搭載しました。特にGNSSの位置情報が不安定な環境下でも安全で安定した飛行を可能にするため、ドローンが飛行中に自動でVisual SLAMに切り替わる技術を開発しました。
これにより、本ドローンは調査する壁面に対し、事前に設定した飛行ルートに従い距離を維持しながら安全・安定的に垂直飛行することが可能です。さらに人口集中地区においては2点係留装置による飛行制御を選択することで、物理的にも安全に飛行させることが可能です。また、今回開発したシステムは小型赤外線装置とドローンのフライトコントローラーが連動しており、制御指示や撮影時のドローン飛行情報を撮影画像に自動付加して保存できる仕様となっています。
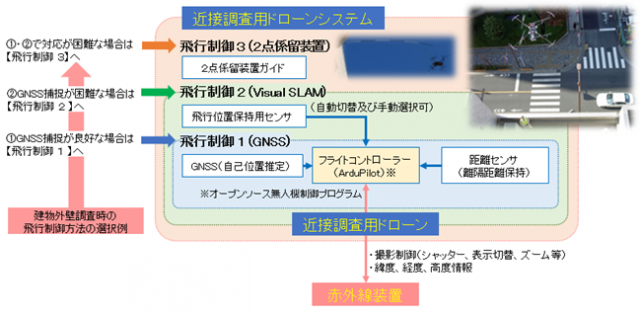
図3 開発した近接調査用ドローンシステムによる飛行制御の概念図
【3】SLAM情報を利用した赤外線画像のポスト処理による診断作業支援プログラムの開発
赤外線装置による壁面計測では、太陽光や周辺建物などが映り込んでしまい検査の障害となることがあります。また移動しながら計測するドローンでは、分割された壁面の画像をつなぎ合わせる作業が必要となります。これに対し、今回開発したSLAM情報を利用した赤外線画像のポスト処理プログラムは、SLAM情報を活用し画像を自動でつなぎ合わせることで診断作業の支援を行います。さらに連続して撮影した赤外線画像からSLAM情報を利用して重複領域を算出、平均化処理を行い、診断精度に影響を及ぼすノイズ成分を低減する処理プログラムも開発しました。これらのポスト処理プログラムは、赤外線画像を用いた外壁診断の信頼性向上に寄与する基本技術と期待されています。
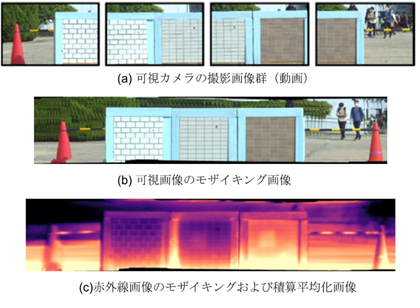
図4 可視カメラ(動画)データを利用したモザイキング画像の自動生成と
赤外線画像のポスト処理による精度向上
【4】小型赤外線装置(開発機)における外壁の浮きやはく離を検出する性能検証
(1)従来の赤外線装置(地上設置)との比較検証
モデル試験体による実験および実建築物における実証実験で外壁の浮きやはく離を検出する精度を検証した結果、得られたラインプロファイル※11から開発した小型赤外線装置と従来の赤外線装置(地上設置)でほぼ同じ変化を示しました。
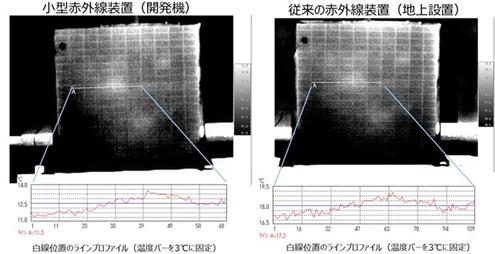
図5 小型赤外線装置(開発機)と従来の赤外線装置(地上設置)の性能比較
(2)打診法との比較検証
建築基準法に基づく定期調査で用いる打診法との比較では、近接調査用ドローンに搭載した小型赤外線装置で以下の課題を整理する必要があることが分かりました。
・赤外線装置法と打診法の特性の違いの精査
・タイルの表面反射(光沢)などのタイル種類の特性への対応
・周辺建物の反射などの影響を排除した運用方法
併せて、建築基準法に定める建築実務への社会実装を視野にドローンの安全飛行方法などを含む「赤外線装置搭載ドローンを活用した建築物外壁調査 実施マニュアル(案)」を作成しました。
3.今後の予定
本事業で開発した「外壁調査に適した赤外線装置と近接調査用ドローンシステム」は、これまでの技術的課題を解決すると同時に、本システムを適切に運用するための検討も進めることで「技術から運用までの一気通貫のシステム」として建築分野に社会実装されることを重要視したものです。
例えば今回の「近接調査用ドローンシステム」は建築物を対象としていますが、将来は外壁調査だけでなくGNSSの位置情報が不安定と想定される幅広い分野での使用が見込まれています。このため、まずは本システムの信頼性を向上する研究を進めていきます。また同じく今回開発した「小型赤外線装置」も、赤外線画像に加え4K可視画像も同時に記録する機能を備えています。これを生かせば、例えば橋梁などのインフラ構造物点検や、化学プラント設備の状態監視などにも適用可能であり、さらにSLAMによる位置情報を利用することで長大な構造物など、さまざまな構造物を安全かつ効率的に調査できると見込んでいます。
また、今回の検証から判明した赤外線装置法と打診法との調査方法の特性の違い、調査運用面での課題についても整理を進める予定です。
今後、人口集中地区でドローンによる構造物調査などを行う上で、本システムはあらゆる活用が期待されています。NEDOと5機関は今回開発した小型赤外線装置と近接調査用ドローンシステム、SLAM情報を利用した赤外線画像の誤差要因を除去するプログラムを活用し、早期の社会実装を後押ししていきます。
【注釈】
※1 特定行政庁
建築主事が設置された市町村や都道府県
※2 GNSS
Global Navigation Satellite System(全球測位衛星システム)の略語
※3 Visual SLAM
カメラ映像を用いたSLAM
SLAM:Simultaneous Localization and Mapping(自己位置推定と環境地図作成を同時に行う技術)の略語
※4 2点係留装置
屋上と地上の2点をラインで結び、その間でドローンを係留して飛行させる為の装置
※5 SLAM
※3参照
※6 赤外線画像のポスト処理
得られた複数の赤外線画像とSLAM情報を組み合わせた画像処理
※7 ダウンウォッシュ
プロペラ回転時に発生する吹き降ろし
※8 Optical Flow
画像認識で、画像中の物体の動きをベクトル場で表したもの
※9 LiDAR
Light Detection And Ranging(光による検知と測距)の略語
※10 Range Finder
距離測定器
※11 ラインプロファイル
赤外線画像内の任意の線(ライン)上の温度変化をグラフで表したもの
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
(株)コンステック 技術開発本部 調査技術部 担当:佐藤大輔 TEL:03-6450-0634 E-mail:tech-info@cons-hd.co.jp

